清華新聞網(wǎng)9月19日電 9月7日,清華大學柔性電子技術(shù)實驗室、航院張一慧教授課題組發(fā)表闡述三維柔性電子器件的力學引導(dǎo)組裝方法的綜述文章。該文章以器件的結(jié)構(gòu)與功能為主線,從力學組裝原理出發(fā),系統(tǒng)總結(jié)了面向三維柔性電子器件制造的力學引導(dǎo)組裝方法,綜述了三維柔性電子器件在生物/醫(yī)療、電磁、能源、光電、機器人等眾多領(lǐng)域的應(yīng)用,并對力學引導(dǎo)三維組裝方法的現(xiàn)有挑戰(zhàn)及發(fā)展方向進行了分析與展望。
三維柔性電子器件在生物學、醫(yī)學、能源、機器人、健康監(jiān)測等領(lǐng)域具有重要應(yīng)用價值。力學引導(dǎo)的三維組裝方法通過利用先進材料及結(jié)構(gòu)力學原理,將器件構(gòu)型由平面轉(zhuǎn)為三維。該方法具有材料/尺度適用范圍廣、成型后可再變形、可兼容平面加工工藝等優(yōu)勢,是三維柔性電子器件的核心制造方法之一。
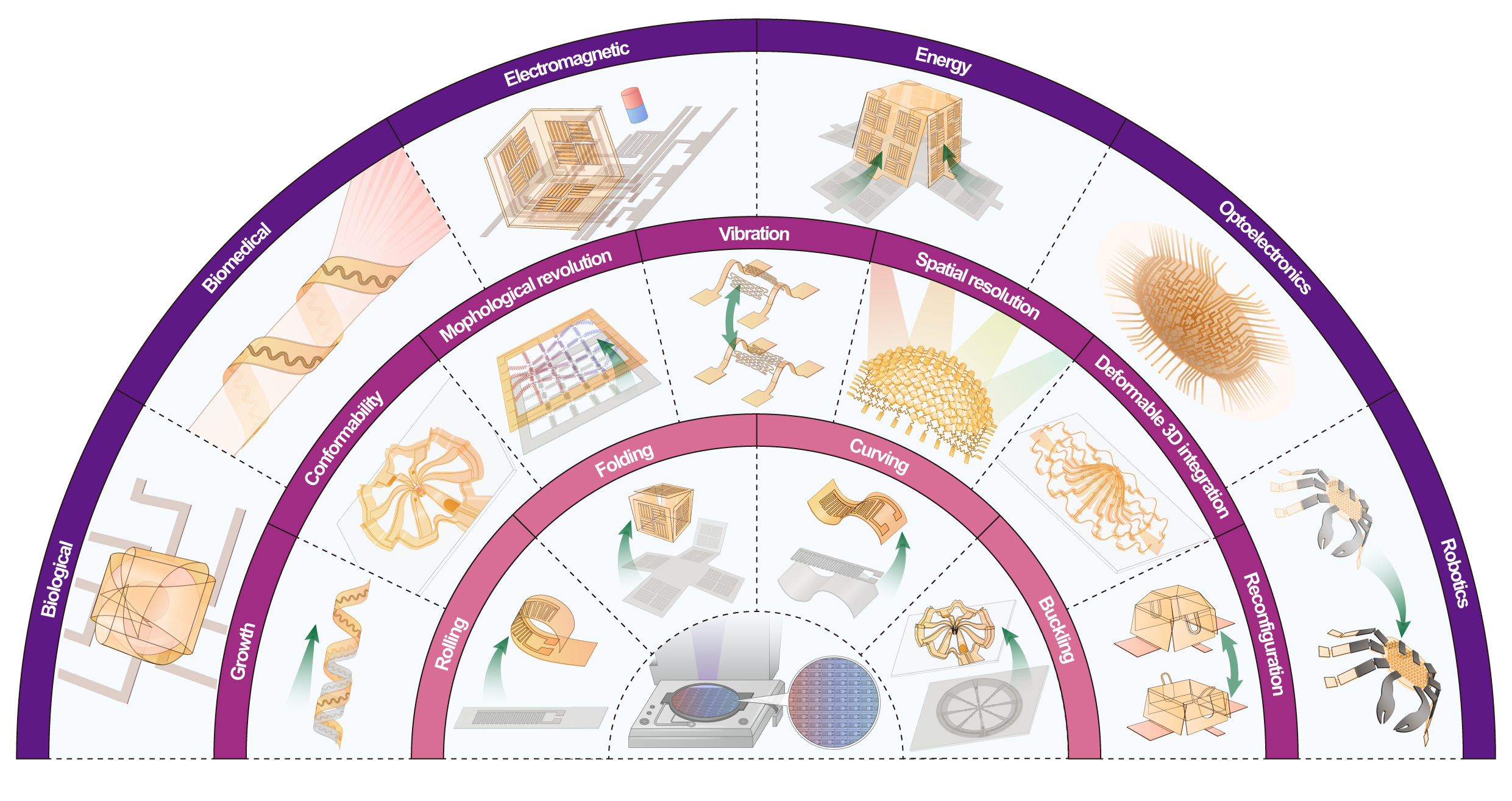
圖1.三維柔性電子器件的力學引導(dǎo)組裝方法。內(nèi)圈為四種三維組裝方法:彎曲組裝、折疊組裝、共形組裝和屈曲組裝;中圈為器件的結(jié)構(gòu)性功能;外圈為三維柔性電子器件在生物/醫(yī)療、電磁、能源、光電、機器人等領(lǐng)域的應(yīng)用
該文章基于變形模式的區(qū)別(圖1,內(nèi)圈),將現(xiàn)有的主要力學引導(dǎo)三維組裝方法分成四大類(即卷曲、折疊、共形及屈曲組裝),并分別進行了全面總結(jié)。隨后,文章對三維柔性電子器件的兩個核心組成部分(即互聯(lián)導(dǎo)線與器件主結(jié)構(gòu))進行了全面回顧。基于上述內(nèi)容,文章深入分析總結(jié)了三維柔性電子器件所特有的多種結(jié)構(gòu)性功能(即三維集成與空間分辨率、能量收集、三維共形電子界面及自生長/可重構(gòu)/結(jié)構(gòu)演化)(圖1,中圈和圖2),并回顧了三維柔性電子器件在生物/醫(yī)療、電磁、能源、光電、機器人等眾多領(lǐng)域的應(yīng)用(圖1,外圈)。最后,文章分析了力學引導(dǎo)的三維柔性電子器件組裝方法所面臨的挑戰(zhàn)及其未來發(fā)展方向。
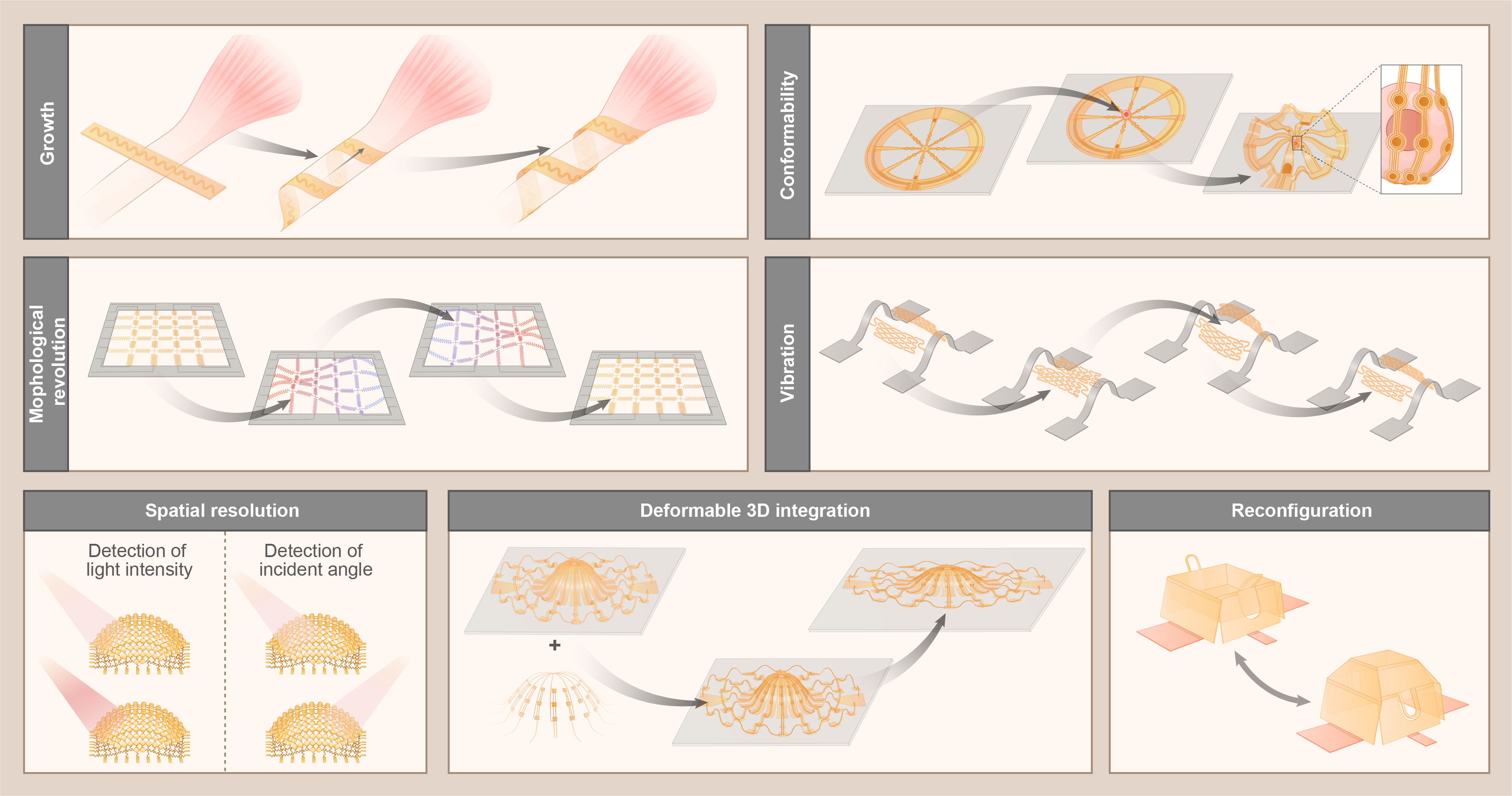
圖2.三維柔性電子器件的結(jié)構(gòu)性功能
張一慧課題組長期致力于三維微納結(jié)構(gòu)組裝、軟物質(zhì)與柔性結(jié)構(gòu)力學等領(lǐng)域的研究,提出了利用屈曲力學實現(xiàn)三維微結(jié)構(gòu)組裝的原創(chuàng)思想,建立后屈曲分析的雙參數(shù)攝動展開理論和三維組裝的逆向設(shè)計方法及實驗技術(shù),形成了一套適用于各種高性能材料和復(fù)雜幾何拓撲的微結(jié)構(gòu)及電子器件三維組裝方法體系。在此基礎(chǔ)上,研制出仿視網(wǎng)膜三維電子細胞支架、多步態(tài)微型攀爬軟體機器人、仿風傳種子三維微電子飛行器、心臟共形電子器件等多種具有新功能的電子器件及微系統(tǒng)。自2015年以來,相關(guān)成果發(fā)表于《科學》《自然》《自然綜述·材料》《自然材料》《自然·電子》《科學機器人》《固體力學與物理雜志》等國際學術(shù)期刊。
近日,該文章以“三維柔性電子器件的力學引導(dǎo)組裝方法”(Mechanically-guided 3D assembly for architected flexible electronics)為題發(fā)表在《化學評論》(Chemical Reviews)期刊上。
清華大學柔性電子技術(shù)實驗室、航院張一慧教授是該文章的通訊作者。清華大學航院博士后柏韌恒、2020級博士生徐世威和2023級博士生羊佑舟為文章的共同第一作者。本工作得到國家自然科學基金委、新基石科學基金會所設(shè)立的科學探索獎、清華大學信息科學技術(shù)國家實驗室、清華大學國強研究院基金、中國博士后科學基金等的支持。
論文鏈接:
https://pubs.acs.org/doi/10.1021/acs.chemrev.3c00335
供稿:航院
題圖設(shè)計:曾儀
編輯:李華山
審核:郭玲