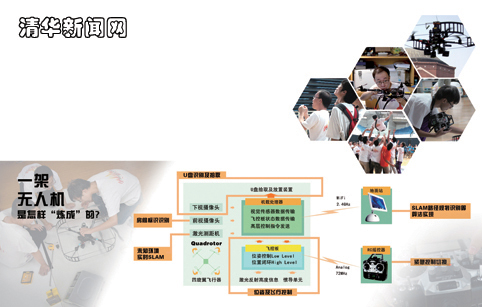
清華無人機,,飛出世界NO.1
——記2013國際空中機器人大賽冠軍THRONE團隊
記者 程曦
現(xiàn)場直擊
2013年8月4日下午2點半,,清華大學綜合體育館,,2013國際空中機器人大賽(亞太賽區(qū))比賽現(xiàn)場,。全部比賽接近尾聲,,只剩下清華THRONE代表隊即將進行因靜態(tài)展示獲最高分而贏得的一次額外試飛。
人們在清華THRONE代表隊的地面站和比賽區(qū)域外“自動集結(jié)”,,里三層外三層圍得水泄不通,。前一天的比賽中,清華的空中機器人(又稱“無人機”)一鳴驚人,,僅用8分鐘時間就率先完成了全球7個國家32支代表隊連續(xù)4年都沒能挑戰(zhàn)成功的任務(wù),。這是偶然嗎?
.jpg)
攝影 譚樹龍 制圖 陳琳
入口指示燈滅,警報暫時解除,,無人機穩(wěn)穩(wěn)地從窗口潛入“安全機構(gòu)”,,在走廊與房間中自如轉(zhuǎn)向、穿行,。排除一個又一個房間,,來到走廊盡頭——這似乎正是它要尋找的目標房間,可它在屋里盤旋了幾周,,場外的人們還是沒有在大屏幕上看到無人機的“獵物”——一張放有U盤的桌子,。正在這時,地面站屏幕顯示房間內(nèi)側(cè)出現(xiàn)一個新的豁口,,無人機就像長了眼睛一樣,,“義無反顧”地扎了進去。原來是個套間,,桌子果然在這里,!人們發(fā)出一陣贊嘆的驚呼。
很可惜,,時間已經(jīng)不夠用了,但大家還是屏息凝神期待著THRONE無人機的進一步表現(xiàn),。慢慢飛到桌子上的盒子的正上方,,下降,旋轉(zhuǎn),,重新拔起,,墜下自帶的假U盤,準備離開,。它鉤住目標U盤了嗎,?飛行器腳架底部的“爪子”終于出現(xiàn)在監(jiān)控攝像頭中,磁鐵上牢牢吸附著目標U盤,!
超時,,能源耗盡。但最終結(jié)果已經(jīng)不重要了,,關(guān)鍵是清華的無人機連續(xù)兩次漂亮地做到了比賽對手們難以企及的事,!一直在現(xiàn)場觀戰(zhàn)、并且親手把U盤放到套間里以升級比賽難度的國際無人系統(tǒng)協(xié)會基金會執(zhí)行主任達里爾·戴維森要來話筒,,第一時間表達祝賀:“清華的隊員們一次又一次做到了賽前大家認為可能無法完成的事,,這是非凡的成績,給人留下了極為深刻的印象,。”
3天后,,北美賽區(qū)戰(zhàn)況揭曉,包括密歇根大學、佐治亞理工學院等在內(nèi)的“業(yè)內(nèi)高手”無一完成任務(wù),。清華大學THRONE代表隊成為全球惟一一支挑戰(zhàn)成功的“任務(wù)終結(jié)者”,,獨享累積了4年的4萬美元獎金。
這已經(jīng)是一個足夠輝煌的戰(zhàn)績,。但是很多人不知道,,就在8月3日晚上,清華的無人機在調(diào)試中意外摔落,,傳感器硬件出現(xiàn)問題,,隊員們不得不采取了較為保守的搜索策略。如果沒有這次意外,,他們原本打算啟用的“瘋狂版”策略按計劃登場,,那么無論U盤被放置在多么隱蔽的地方,無人機都能在5分鐘內(nèi)飛到裝有U盤的盒子上方,!
僅僅第二次參賽,,他們就以無可爭議的表現(xiàn),向世人展示了無人機領(lǐng)域的“清華速度”,、“清華水平”,。
引子 與頂尖高手同場競技
2010年,自動化系戴瓊海教授作為首席科學家開始主持國家973計劃項目“復(fù)雜條件下飛行器進近可視導(dǎo)航的基礎(chǔ)理論研究”,。此前,,戴瓊海帶領(lǐng)的寬帶網(wǎng)數(shù)字媒體實驗室在立體視覺及計算攝像學方面取得了重要進展,并希望借助已有研究成果進一步在飛行器視覺導(dǎo)航方面有所建樹,。2011年,,戴瓊海安排研究生王玉旺進行無人機方面的調(diào)研,了解相關(guān)領(lǐng)域的發(fā)展情況,,國際空中機器人大賽就這樣走入了他們的視野,。
國際空中機器人大賽(International Aerial Robotics Competition,IARC)始創(chuàng)于1991年,,由著名機器人學家,、佐治亞理工學院教授羅伯特·米切爾森發(fā)起,由國際無人系統(tǒng)協(xié)會(Association for Unmanned Vehicle Systems International,,AUVSI)舉辦并贊助,。美國斯坦福大學、卡耐基梅隆大學,、佐治亞理工學院,、麻省理工學院和德國柏林理工大學等世界一流名校都曾是比賽的贏家。比賽最突出的特點就是需要空中機器人在無人干預(yù)的情況下自主完成任務(wù),。比賽歷經(jīng)六代任務(wù),,每代任務(wù)都設(shè)計了富有想象力的背景(如災(zāi)難現(xiàn)場搜救,、核電廠搶險、古墓奪寶等),,具有很強的挑戰(zhàn)性和趣味性,,任務(wù)完成后就進入下一代任務(wù)。第1~4代任務(wù)注重室外自主飛行(可以借助GPS等定位設(shè)備),,從第5代開始加大難度,,改為室內(nèi)環(huán)境并且不能依賴任何外部定位設(shè)備的輔助,自2010年開始的第6代任務(wù)更是在完全自主飛行的基礎(chǔ)上提出與環(huán)境交互的要求,。要想順利完成任務(wù),,參賽隊的小型自主飛行器必須在10分鐘內(nèi)完成秘密潛入、搜索房間,、尋找并調(diào)換U盤以及秘密撤退的全過程,,難度非常大。
這項在無人機視覺導(dǎo)航領(lǐng)域與國際高手過招的比賽很快引起了自動化系師生的興趣,。2012年,,恰逢大賽首次在中國設(shè)立亞太賽區(qū),以自動 化系學生為主體,,清華正式組隊參賽,。因為時間緊、難度大,,加上比賽主要考察的是各參賽隊無人機的高層控制系統(tǒng)設(shè)計,,所以團隊從德國公司購買了飛行器基礎(chǔ)系統(tǒng)、傳感器系統(tǒng),、機載電腦和其他底層控制系統(tǒng)配件,在戴瓊海的指導(dǎo)和自動化系博士后李一鵬的帶領(lǐng)下,,用不到3個月的時間完成了通信架構(gòu),、未知環(huán)境自主建模與定位、路徑規(guī)劃和飛行器控制4個模塊的設(shè)計工作,,為比賽作好了準備,。
實際比賽的結(jié)果卻不盡如人意。由于缺乏比賽經(jīng)驗,,對比賽場景的復(fù)雜程度估計不足而暴露了大量程序設(shè)計上的漏洞,,最后清華的無人機雖然順利進入窗口,但只是在走廊里探尋了一番便返航了,,沒有開展下一步的搜索行動,。盡管首次參賽便獲得亞太賽區(qū)第二、全球第四的較好成績,,但隊員們自己并不滿意,,憋了一股勁兒要在今年的主場比賽中為清華無人機“正名”,。
亮點 每一步都考慮最復(fù)雜情況
在現(xiàn)場看比賽的觀眾都會有一個感覺:清華的無人機是最智能的。當大多數(shù)隊伍還在努力控制無人機的飛行姿態(tài),、為越過激光絆網(wǎng)進入窗口而努力時,,清華的無人機總能穩(wěn)健而敏捷地直直“潛入”,在走廊里全速前進,;到了正確的門牌號前,,它的識別迅速精準;而當來到目標U盤上空時,,它又不急不躁,,調(diào)整到最佳姿態(tài)和高度,一抓一放,,順利“以假亂真”,。
過程的完美,是用不放過任何細節(jié)的準備換來的,。在比賽任務(wù)涉及的每一個環(huán)節(jié),,隊員們都盡最大可能設(shè)計最魯棒的程序和最高效的策略。這次比賽中,,另一支強隊和清華擁有同一公司生產(chǎn)的無人機,,效果卻差了很多。兩隊交流時他們驚訝地發(fā)現(xiàn),,清華隊員編寫的代碼共約20000行,,是他們的20倍!
陳琳 圖
去年的比賽經(jīng)歷讓清華隊員們對“細節(jié)決定成敗”有了更深層次的認識,,任何一個環(huán)節(jié)的瑕疵都會導(dǎo)致整個任務(wù)的失敗,。高精度的室內(nèi)未知環(huán)境自主定位、高效快速的路徑規(guī)劃策略可以保證系統(tǒng)戰(zhàn)略層次的整體性,,正確識別目標房間和放在桌子上盛有U盤的盒子則是戰(zhàn)術(shù)層次上的細節(jié),,而這一切又都構(gòu)建在精準的飛行器姿態(tài)控制框架上。
完全未知且復(fù)雜的室內(nèi)比賽環(huán)境,,對無人機的自主定位是很大的考驗,。因為比賽過程中不準使用GPS等外部定位設(shè)備,飛行器每前進一步,,都必須依靠自己的“眼睛”——機載傳感器進行自主定位,。隊長王玉旺充分考慮了飛行器高動態(tài)對激光束環(huán)境掃描結(jié)果的影響,合理選取建模數(shù)據(jù)并構(gòu)建了完備的自主定位框架,。同時,,利用平面鏡反射激光束來測量飛行高度,這樣就能通過二維掃描實現(xiàn)高度測量和定位,,最終使無人機室內(nèi)自定位精度達到厘米級別,。
在路徑規(guī)劃方面,,系統(tǒng)智能性的提升更為明顯。去年比賽中飛行器采用的是單一的“沿墻走”算法,,就像進入迷宮或黑夜里的人,,只能摸著墻走,才能保證不重復(fù),、不走丟,,但探索效率太低。今年李一鵬和自動化系研究生蘆維寧共同設(shè)計出“以未知區(qū)域為驅(qū)動”的主動探索策略,,充分發(fā)揮了飛行器“眼睛”的作用,,在保證環(huán)境搜索遍歷性的同時大大提高了搜索效率。
同為自動化系大四畢業(yè)生的閆偉和施澤南分別負責“找門”和“找盒子”,。閆偉的程序足以排除形狀相似的假門,,不需要消耗時間排查可疑對象,直接就能把它帶到正確的門前,;施澤南則跳出一般隊伍先找桌子,、再找盒子的窠臼,利用激光掃描捕捉房間內(nèi)明顯異常的輪廓,,然后根據(jù)線條形狀,、角度、長度等特征驗證它與盒子的匹配程度,,很快就能直接把盒子“拎出來”,。
還有一個讓隊員們頗感自豪的巧妙設(shè)計就是“切參數(shù)”。針對無人機飛得快就不穩(wěn),、飛得穩(wěn)就不快的特點,,自動化系本科畢業(yè)生羅濬維為底層飛控系統(tǒng)設(shè)計了兩套參數(shù)、兩種模式:在空蕩蕩的走廊里采用“暴走模式”,,步長達到80厘米甚至1米,,最大限度地提高探索效率;而在房間內(nèi)尋找盒子和抓取U盤時,,為了保證命中率,則要切換到“定點模式”,,穩(wěn)扎穩(wěn)打,。
為了確保整個策略的魯棒性,隊員們搭建了一個“自黑”的環(huán)境,,本著“盡可能讓飛機出問題”的原則,,制造各種極端情況來刁難自己,再一一加以解決,。施澤南自信地說:“別說套間,,就是里面再套一個房間,,我們的無人機也能把它找出來。房間里的復(fù)雜程度只是延長了它的工作時間,,并不會影響我們算法的整體性,。”
團隊 “推”飛機推出的世界第一
清華的團隊力量在這次比賽中給人留下了深刻印象。賽后的頒獎晚宴上,,大賽裁判委員會主任,、北京航空航天大學教授陳宗基指出,清華THRONE團隊今年之所以取得這么好的成績,,一個很重要的原因就是特別注重隊伍傳承,。
本屆比賽清華的參賽隊伍由來自自動化系和錢學森力學班的15人組成,包括博士后3人,、碩士生4人,、本科生8人。除了指導(dǎo)教師李一鵬和王玉旺,、蘆維寧,、羅濬維、張奕烜,、楊盛等5名核心隊員繼續(xù)留隊,,今年的參賽隊伍中有很多新生力量。去年的老隊員因為畢業(yè)等原因沒能繼續(xù)參賽的,,只要有需要還會隨時提供幫助,,并且介紹得力的同學或師弟師妹加盟。
兩年來,,清華知名度很高的學生科技團體“天空工場” 和未來機器人興趣團隊等都為THRONE團隊提供了人力物力支持,。來自未來機器人興趣團隊的自動化系大二學生李修雖然年輕,卻是隊員們眼里的“硬件百事通”,,他那個大大的工具箱里裝滿了其他同學看來非常神秘的工具,,不管多么千奇百怪難以搞定的硬件問題,到他手里基本都有解決辦法,。
高中時曾在全國青少年信息學奧林匹克競賽中獲得佳績的自動化系大一學生張洵愷有種能用“類似計算機運行的方式”思考問題的絕技,,做了很多系統(tǒng)算法的優(yōu)化工作,包括為室內(nèi)探索的策略寫了兩個很重要的函數(shù),;主動請纓加入團隊的錢學森力學班大一學生何長耕雖然在技術(shù)上暫時還不能幫到學長們太多,,但他積極參與討論,并承擔了緊張備戰(zhàn)過程中大部分的“體力活”,,邊干邊學,。
這支隊伍里的每位隊員都有自己的過人之處,更難得的是,,他們懂得怎樣把力量凝聚在一起,,在最短的時間里共同取得最大的進步,。
集中備戰(zhàn)的兩個月里,隊員們回宿舍睡覺的時間越來越晚,,到最后干脆就在實驗室用泡沫塑料板打地鋪,。比賽前的兩三周,各個模塊都要用惟一的一架飛機進行調(diào)試,,大家就分成白班夜班輪流工作,,平均每人每天至少工作十七八個小時。
為了充分驗證遍歷走廊,、尋找房間,、搜索U盤以及安全退出等策略的完備性,確保最終能夠完成任務(wù),,同時為了提高實驗效率,,清華無人機大量的程序調(diào)試都是通過“推”而不是“飛”來完成的。李一鵬介紹說,,曾經(jīng)有整整一周的時間,,白天他跟隊員們編寫核心代碼并進行飛行測試,晚上再帶著蘆維寧,、何長耕在主樓8層長長的走廊里推飛機,。他們半蹲在地上,把飛機放在小車上,,用雙手推行以模擬各種飛行狀態(tài),。前進40厘米、左轉(zhuǎn)30度,、后退10厘米……往往一推就推到天亮,,這才感覺到腰部酸疼難忍。一個星期的推飛機實驗,,為比賽中成功完成任務(wù)奠定了堅實的基礎(chǔ),。
THRONE飛行器上那個抓取U盤的精巧裝置,也是臨近比賽時大家“頭腦風暴”的結(jié)晶,。操作手李修在去年的設(shè)計基礎(chǔ)上改進了機械吊臂的設(shè)計,,之后又設(shè)計了一個懸掛磁鐵并利用下視攝像頭的裝置,但機械臂過硬,,而線又過軟,,效果并不理想。最后,,大家把目光落在了平時經(jīng)常隨手擺弄的小工具——尼龍扎帶上。在王玉旺的創(chuàng)意基礎(chǔ)上,,隊員們花了一天的時間進行詳盡的改進實驗,,發(fā)現(xiàn)很多問題并最終確定了扎帶軟爪的磁鐵數(shù)量,、長度、懸掛位置,,以及飛機在盒子上方定位位置,、旋轉(zhuǎn)圈數(shù)等一系列參數(shù)。之后的每次實驗,,飛機十有八九都能吸到U盤,,這才造就了比賽中似乎“信手拈來”的效果。
兩個月的時間里,,有苦也有樂,。他們每個人都做過摔飛機的噩夢,也曾一起為把飛機總重量控制在比賽要求的1500克以內(nèi),,賽前最后一晚瘋狂地扒膠帶,、卸外殼、換螺絲,。眼看飛機越來越“本色”也越來越輕盈,,伴隨著汗水涌出的,還有濃濃的成就感,。
8月3日下午,,當凝聚了他們無數(shù)心血的小小四旋翼飛機從“安全機構(gòu)”里帶著U盤輕巧飛出時,隊員們把李一鵬高高拋到了空中,。那一刻,,這個永遠在早上負責叫醒隊員、從來也沒有人看到他什么時候入睡的粗獷的東北小伙兒感到了心中說不出的酸甜苦辣,。
展望 為無人機裝上高科技的“智慧之眼”
談到比賽帶來的收獲,,王玉旺和施澤南有一個共同感受,就是終于真正理解了“自動化”這個專業(yè)的含義,。它不僅僅是自動控制,,也不是同學間打趣時說的“比電子軟一點,比計算機硬一點”,。為了這次比賽,,他們分工合作,完成了底層通信,、未知環(huán)境自主建模與定位,、路徑規(guī)劃和飛行器控制等軟件模塊,親手加裝改造一些硬件設(shè)備,,把一架“裸機”改造成“慎思層制定策略,、算法層實現(xiàn)策略、控制層貫徹策略”的智能飛行系統(tǒng),收獲的不僅是成就感,,更是對這整個體系的深刻理解與融會貫通,。
成績并沒有蒙蔽隊員們的雙眼,他們清醒地認識到,,對實際應(yīng)用而言,,這架飛機還是太簡單了。未來的研究工作中,,他們希望能進一步解決基礎(chǔ)核心問題,,實現(xiàn)真正的三維環(huán)境重建和更智能的目標識別。
戴瓊海曾經(jīng)在課堂上提出一個設(shè)想:“能不能有這么一架無人機,,從7樓實驗室穿過人群和樓梯等各種障礙物,,為在4樓上課的我端來一杯水?”這個對人類來說輕而易舉的任務(wù),,要想由空中機器人來完成,,需要做的事還很多。
一個以視覺研究為主的實驗室,,為什么對無人機的課題這么感興趣,?李一鵬介紹說,戴瓊海領(lǐng)導(dǎo)的寬帶網(wǎng)數(shù)字媒體實驗室在立體視覺,、計算視覺等方面擁有雄厚的理論積淀,,無人機視覺導(dǎo)航則是這些理論成果的重要應(yīng)用方向之一。“現(xiàn)在無人機研究的前沿方向不再是底層的飛行控制系統(tǒng),,而是上層的傳感器載荷,。豐富的傳感器及精準的處理算法就是無人機的高科技‘眼睛’。有了這雙‘智慧之眼’,,無人機才能真正成為一個智能飛行系統(tǒng),,在未來的國民經(jīng)濟建設(shè)中發(fā)揮不可替代的作用。”
比賽已經(jīng)結(jié)束,,而夢想終將升華,。在未來的日子里,THRONE團隊希望能設(shè)計出更加精巧復(fù)雜的智能飛行系統(tǒng)和集群,,具備室外自然環(huán)境自主定位與導(dǎo)航功能,,并能夠?qū)崟r重建大型建筑物的三維模型。“目前,,國際上相關(guān)領(lǐng)域最出色的高校也只能做到離線建模,。若能實現(xiàn)廣闊自然場景中的自主環(huán)境感知和實時三維建模,那將是非常前沿的科技成果,。”對這樣的前景,,李一鵬充滿信心。
來源:新清華 2013-08-30