清華新聞網(wǎng)6月16日電 在近日舉行的2020年機(jī)器人與自動(dòng)化國際會(huì)議(International Conference on Robotics and Automation,簡稱ICRA)上,清華大學(xué)航天航空學(xué)院助理教授眭亞楠與美國加州理工學(xué)院的合作者發(fā)表了題為“基于偏好反饋的外骨骼步態(tài)優(yōu)化學(xué)習(xí)”(Preference-Based Learning for Exoskeleton Gait Optimization)的研究論文,獲得大會(huì)唯一最佳論文獎(jiǎng),并同時(shí)獲得最佳人機(jī)交互論文獎(jiǎng)。
ICRA是機(jī)器人和人工智能領(lǐng)域最重要的國際會(huì)議之一。這是加州理工學(xué)院和清華大學(xué)首次獲得ICRA最佳論文獎(jiǎng)。
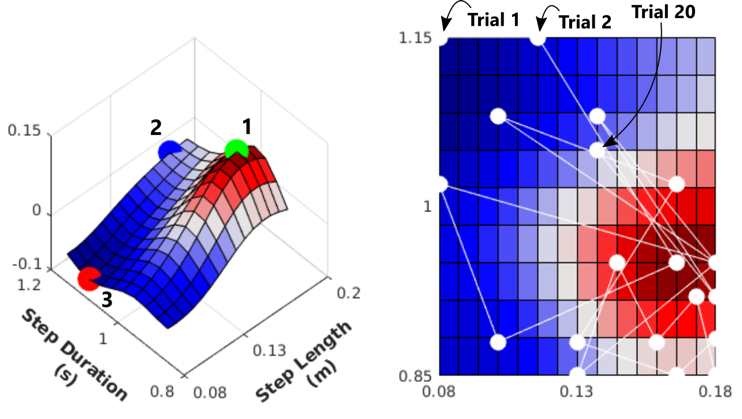
本文在眭亞楠等人前期工作的基礎(chǔ)上構(gòu)建了一種交互式的機(jī)器學(xué)習(xí)方法,可以根據(jù)使用者的偏好和建議來優(yōu)化外骨骼機(jī)器人的步態(tài)動(dòng)作。文章提出了一個(gè)新穎且靈活的機(jī)器學(xué)習(xí)框架,并在真實(shí)外骨骼機(jī)器人系統(tǒng)中進(jìn)行了細(xì)致的實(shí)驗(yàn)驗(yàn)證。該方法在人機(jī)交互和康復(fù)醫(yī)療方面具有廣泛的應(yīng)用空間。


會(huì)議公布最佳論文獎(jiǎng)和最佳人機(jī)交互論文獎(jiǎng)

基于偏好反饋的優(yōu)化方法應(yīng)用于外骨骼機(jī)器人控制
基于偏好反饋的機(jī)器學(xué)習(xí)方法利用非量化的反饋信息進(jìn)行優(yōu)化,本工作是將偏好學(xué)習(xí)方法應(yīng)用于外骨骼機(jī)器人步態(tài)優(yōu)化的全新嘗試。在外骨骼控制中將人的偏好反饋納入步態(tài)優(yōu)化,是實(shí)現(xiàn)舒適個(gè)性化調(diào)節(jié)的有效方法。文章在提出新算法的基礎(chǔ)上,進(jìn)行模擬實(shí)驗(yàn)并由人類受試者實(shí)驗(yàn)驗(yàn)證,做出了機(jī)器學(xué)習(xí)方法和機(jī)器人實(shí)驗(yàn)兩方面貢獻(xiàn)。該工作提升了人機(jī)交互效率,癱瘓等運(yùn)動(dòng)障礙患者的康復(fù)治療有望從中受益。
人物介紹:
眭亞楠(YananSui.com),2010年本科畢業(yè)于清華大學(xué),2016年博士畢業(yè)于美國加州理工學(xué)院,后在加州理工學(xué)院和斯坦福大學(xué)進(jìn)行博士后研究。2019年受聘清華大學(xué)航天航空學(xué)院助理教授,神經(jīng)調(diào)控技術(shù)國家工程實(shí)驗(yàn)室成員。主要從事機(jī)器學(xué)習(xí)、神經(jīng)工程、機(jī)器人學(xué)基礎(chǔ)研究和醫(yī)學(xué)人工智能應(yīng)用研究。
獲獎(jiǎng)鏈接:
https://www.icra2020.org/program/conference-awards
論文公開鏈接:
https://arxiv.org/abs/1909.12316
供稿:航院
編輯:李華山
審核:程曦